Ewolucja
Model 1
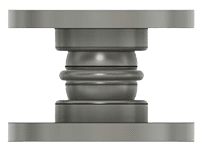
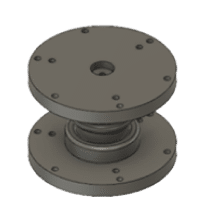
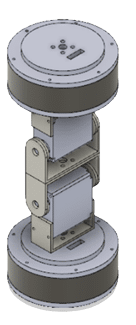
Pierwszy model składał się z dwóch dysków łączonych połączeniem przegubowym. Był to pierwsza próba stworzenia bryły robota. Inspiracją do budowy takiego modelu były manipulatory elastyczne.
Model 1 celowo nie został wyposażony w jednostkę napędową oraz sterowania, ponieważ przeznaczony został głównie badaniu koncepcji budowy napędu. Model ten zakładał ruch w trzech płaszczyznach.
Model 2

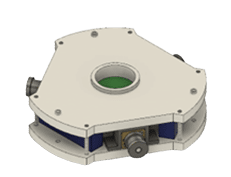
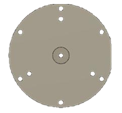
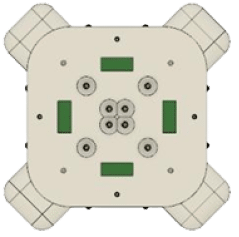
Sukces modelu 1 przyczynił się do zaprojektowania wersji testowej. Robot ten wyposażony w trzy serwomechanizmy łączył się z podobnym sobie robotami poprzez połączenie przegubowe. Ruch umożliwiały linki łączące korpus robota z wałem serwomechanizmu. Wadami konstrukcji okazały się jednak:
- potrzeba kontroli napięcia linek jako jedyny mechanizm kontroli pozycji
- niekontrolowane obroty dysków względem przegubu
- złożony sposób łączenia robotów
Model 3
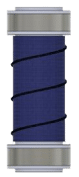
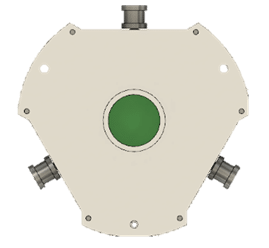
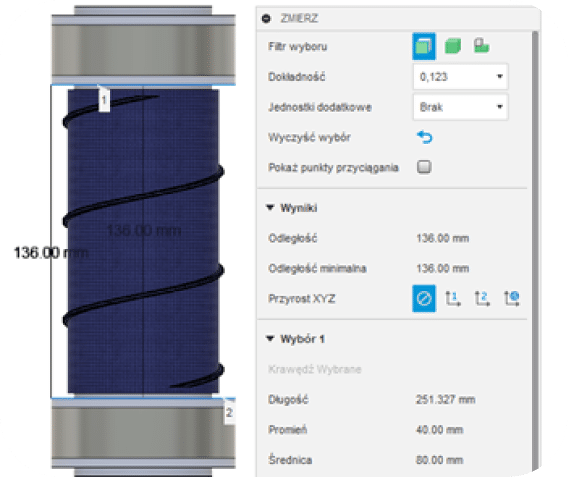
Wady poprzednich modeli usunięto w zaimplementowanym napędzie. Cechował się on:
- łatwością uzyskania zadanego wychylenia
- brakiem konieczności nadzorowania pozycji
- prostą wymianą modułów
Model jednak nie zapewniał optymalnego modelu. Główne wady:
- złożony sposób łączenia
- brak sprzężenia zwrotnego
- konkretne wymagania co do ułożenia modułów oraz ryzyko uszkodzenia tuby
Model 4
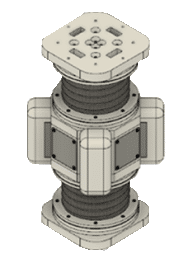
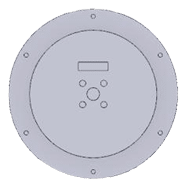
Poprzednie wady poprawiono poprzez:
- skrócenie tuby(136mm->54mm)
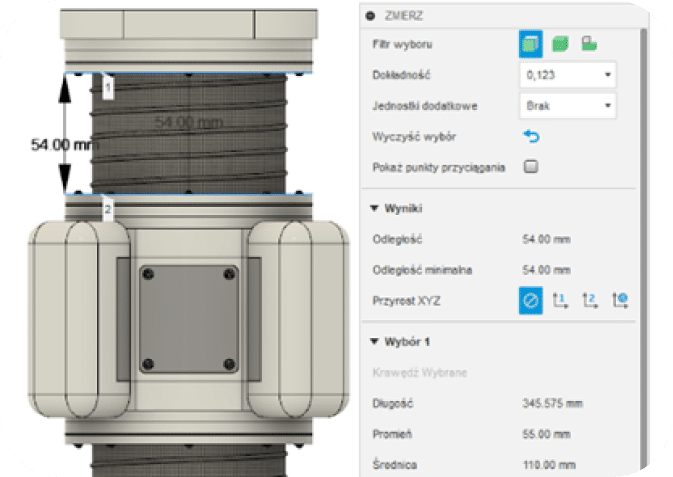
- zastosowanie jedynie jednego serwomechanizmu na tubę
- zastosowanie łączników końcowych
Dodatkowo zrezygnowanie z układu połączonych serwomechanizmów na rzecz rozdzielenia ich połączenia łącznikami końcowymi znacznie skracając czas łączenia robotów.